Posibles
Componentes que se utilizaran en Mask'ax II
SENSOR
DE ULTRA SONIDOS
El sensor SRF04
funciona emitiendo impulsos de ultrasonidos inaudibles para el
oído humano. Los impulsos emitidos viajan a la velocidad
del sonido hasta alcanzar un objeto, entonces el sonido es reflejado
y captado de nuevo por el receptor de ultrasonidos. Lo que hace
el controlador incorporado es emitir una ráfaga de impulsos
ya continuación empieza a contar el tiempo que tarda en
llegar el eco. Este tiempo se traduce en un pulso de eco de anchura
proporcional a la distancia a la que se encuentra el objeto.
Desde un punto de
vista práctico, lo que hay que hacer es mandar un señal
de arranque en el pin 3 del SRF04 y después leer la anchura
del impulso que nos proporciona en el pin 2. El pulso de disparo
tiene que tener una anchura mínima de 10 uS. Después
leemos el pulso de salida de Eco y medimos su longitud que es
proporcional al eco recibido. En caso de que no se produzca ningún
eco, por que no se encuentra un objeto, el pulso de eco tiene
una longitud aproximada de 36 ms. Hay que dejar un retardo de
10 ms desde que se hace una lectura hasta que se realiza la siguiente,
con el fin de que el circuito se estabilice.

SENSOR DE VIBRACION
Sensor de vibración
sin mercurio específicamente diseñado para la detección
del movimiento y la vibración. No le afecta la posición
de montaje, ofreciendo un nivel similar de sensibilidad independientemente
de ésta, siendo adecuado para circuitos analógicos
o digitales. El sensor reacciona cuando es desequilibrado por
un impacto o vibración, produciendo un breve cambio de
estado (pasa de abierto a cerrado o viceversa). El tiempo de perturbación
dependerá de la cantidad de energía recibida en
el momento del impacto. El estado en el que se estabilizará
será arbitrario, a menos que la posición de montaje
sea elegida para una salida NC. Características: Tensión
Max: 24 Vac, Corriente Max: 25 mA, Resistencia Max: 5 ohmio, Temperatura
trabajo:-37 a 100ºC. Angulo: Indiferente. Dimensiones aprox:
10 x 8 mm. No cortar los terminales.

SENSOR DE ACELERACION
Sensor de aceleración
formado por una cápsula hermética que contiene un
contacto normalmente abierto y que se cierra cuando se produce
una aceleración o impacto superior a 5 G +-1,5 G. Cuando
en nivel de aceleración decrece por debajo del umbral de
disparo, el contacto se habré de nuevo. Este sensor resulta
útil para detectar impactos y agresiones en los robots.
Dado la brevedad del contacto en caso de impacto, es recomendable
utilizarlo junto con alguna entrada de interrupción, o
con algún circuito de tipo biestable con memoria que permita
reconocer el evento ocurrido. Características Tensión
Max: 24Vac, Corriente Max: 250 mA, Resistencia Max: 10 ohmio,
Temperatura Trabajo: -20 a 85ºC. Dimensiones 7 x 5 mm. No
cortar los terminales.

SENSOR INCLINACION
Sensor de inclinación
completamente exento de mercurio y totalmente autocontenido en
una cápsula metálica. El sensor es para montaje
horizontal, su estado de conmutación cambia al ser inclinado
unos 10º de la horizontal. Los contactos del sensor estarán
normalmente abiertos o cerrados, según en la posición
en que se monte. La sensibilidad cambia según la posición
de montaje. Muy útil para detectar si un robot esta volcado,
esta siendo atacado o simplemente cuando el robot colisiona con
algo y trata de montarse en el. Tensión Max: 60 Vdc, Corriente
Max: 250 mA, Resistencia Max : 30 ohmio, Temperatura trabajo:-37
a 100ºC. Dimensiones Aprox: 10 x 5 mm. No cortar los terminales.

SENSOR DE TEMPERATURA
El LM35 es un sensor
de temperatura con una precisión calibrada de 1ºC
y un rango que abarca desde -55º a +150ºC.
El sensor se presenta
en diferentes encapsulados pero el mas común es el to-92
de igual forma que un típico transistor con 3 patas, dos
de ellas para alimentarlo y la tercera nos entrega un valor de
tensión proporcional a la temperatura medida por el dispositivo.
Con el LM35 sobre la mesa las patillas hacia nosotros y las letras
del encapsulado hacia arriba tenemos.
MOTORES SERVO MX400
Servo de tamaño
Standard que se caracteriza por su facilidad de modificación
para rotación continua, ya que no requiere soldar cables
ni tocar el circuito, por lo que la operación se realiza
en menos de 3 minutos. Este servo esta especialmente indicado
para labores de locomoción en cualquier robot, siendo totalmente
compatible con los servos Futaba, tanto desde el punto de vista
eléctrico, como mecánico, por lo que las estrías
del eje principal no son compatibles con servos de tipo Hitec.
Cada servo incluye una bolsa con accesorios, tornillos y diferentes
platos de accionamiento. Características a 4,8V: Fuerza
3,1 Kg., Velocidad 0,15 s/60º, Peso 47 gr., Medidas 40,5
x 20 x 38. Conexiones: Naranja - Señal, Rojo- positivo
y Marrón-negativo.

ORUGAS
Juego de orugas
de plástico de alta calidad que permite crear orugas de
tracción de cualquier longitud, ya que se pueden añadir
o quitar los eslabones que se quieran. Cada eslabón esta
formado por una pieza de plástico rígido y su correspondiente
eje de acero que los engarza de forma sólida y precisa.
De esta forma se consigue una oruga de 23 mm de ancho y de una
distancia entre ejes de unos 84 mm. Con las 40 piezas que se incluyen
se consiguen dos orugas de 23 x 130 mm. Cada eslabón tiene
una distancia entre ejes de 14mm, por lo que la oruga se puede
ampliar o disminuir en múltiplos de 14mm. Existen además
kits de expansión de 20 piezas adicionales, que permiten
ampliar las orugas hasta el tamaño deseado. Las ruedas
de tracción encajan con precisión en los pines de
unión de los eslabones, proporcionando un buen agarre entre
la rueda y los eslabones. El kit incluye cuatro ruedas, dos de
ellas se fijan directamente en el cabezal de los servos tipo Futaba
como el S330200, siendo las dos ruedas tractoras. Las otras dos
ruedas tienen un agujero pasante de 6 mm de diámetro que
se pueden fijar con la ayuda de tornillos de métrica 6
o bien con cualquier otro eje de 6mm.

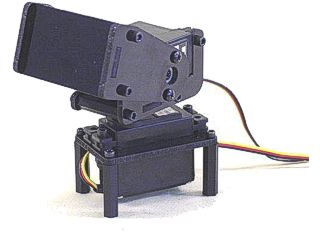
KIT PAN AND TILT PARA CAMARA VERSION A
Pequeño kit
especialmente diseñado para hacer el movimiento horizontal
(pan) y vertical (tilt) de una cámara. Este kit incorpora
dos servomotores estándar, capaz de realizar dos movimientos
independientes en ambos sentidos, por lo que resulta idóneo
para dirigir y controlar una pequeña cámara, o algún
tipo de sensor como puede ser un sensor de ultrasonidos. Su pequeño
tamaño facilita su montaje en los robots tanto pequeños,
como grandes. La cámara o sensor a mover puede sujetarse
fácilmente en el frontal mediante tornillos o utilizando
cinta adhesiva de doble cara. Color Negro. La versión A
resulta ideal para montarla sobre superficies horizontales.
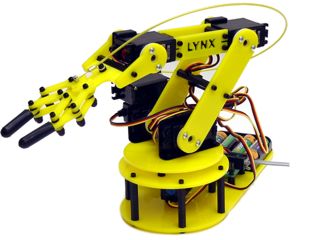
BRAZO MECANICO DE 5 EJES
El brazo robot de
5 ejes desarrollado por Lynxmotion, Inc. es capaz de realizar
movimientos rápidos y precisos de forma repetida. Los ejes
incluyen: rotación de la base, hombro, codo y muñeca,
además de una pinza totalmente funcional, posibilitando
de esta manera 5 movimientos independientes. El montaje es sencillo,
y se realiza fácilmente sin necesidad de herramientas especiales.
Además de la versión básica que incluye la
parte mecánica y los servos, también hay kits completos
que incluyen la electrónica para conectarlos y controlarlos
desde un PC. El brazo robot de 5 ejes es el mas apropiado como
sistema de introducción y aprendizaje de la robótica.
Entre sus usos mas frecuentes, caben destacar: Aficionados a la
robótica, enseñanza en escuelas y universidades,
demostraciones y presentaciones, experimentos de inteligencia
artificial, etc.
CAMARA ESPIA
Mini cámara
espía color con sonido inalámbrica que gracias a
sus 50 mw de potencia es capaz de enviar la señal a varios
cientos de metros. La cámara se caracteriza por su gran
estabilidad de imagen gracias a que utiliza una frecuencia de
1,2 Ghz, siendo mas estable que los modelos a 2,4 Ghz. Por este
motivo, es la cámara ideal para situaciones en las que
hay movimientos como es el caso cuando se lleva la mini cámara
encima. Su sensor de Cmos proporciona una resolución de
380 líneas y una iluminación mínima de 3
lux. Medidas 25x17x23 mm. Alimentación 9V.

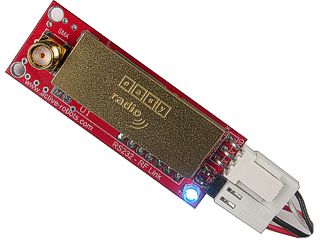
RADIO MODEM
Radio módem
con conexión serie rs 232 que permite transmitir datos
de forma transparente para el usuario. El radio módem se
entrega completo para su uso, incluyendo una pequeña antena
helicoidal, un cable de conexión para puerto serie RS232
y un transformador de alimentación de 12V. Este radio módem
esta basado en modulo de radio de Easy Step S350170 que tiene
unas excelentes características técnicas entre las
que destaca la posibilidad de tener 10 canales diferentes, Selección
del nivel de potencia entre 1 y 10 mW y posibilidad de ajustar
la velocidad de conexión entre 2400 y 38400 baudios, presentando
un nivel optimo de transmisión a 19200 baudios. Todas las
opciones se ajustan fácilmente con el software de configuración
que se puede bajar libremente de Aquí. Una vez realizados
los ajustes, estos quedan almacenado en la memoria interna del
modulo de radio. Este modulo es sin duda la mejor opción
para comunicar dos PC por puerto serie o para hacer un enlace
entre un PC y un robot que también utilice el modulo de
radio Easy Step, como es el caso de robot SR1. Alimentación:
7 a 20 VDC. Dimensiones: 70 x 40 mm. Alcance: 250 M.